



WASHINGTON, ESTADOS UNIDOS.- Especialistas de la Universidad de Washington, en los Estados Unidos, han construido una mano robótica, la cual es capaz de realizar tareas tales como enrollar, girar, doblar (imprescindible al plegar ropa) y hasta notar la fricción. Incluso y a diferencia de otras prótesis que se han presentado, es capaz de aprender de su propia experiencia sin necesidad de instrucciones humanas.
El equipo de Emo Todorov y Vikash Kumar se pasó años construyendo una de las manos robóticas de cinco dedos más altamente cualificadas del mundo.
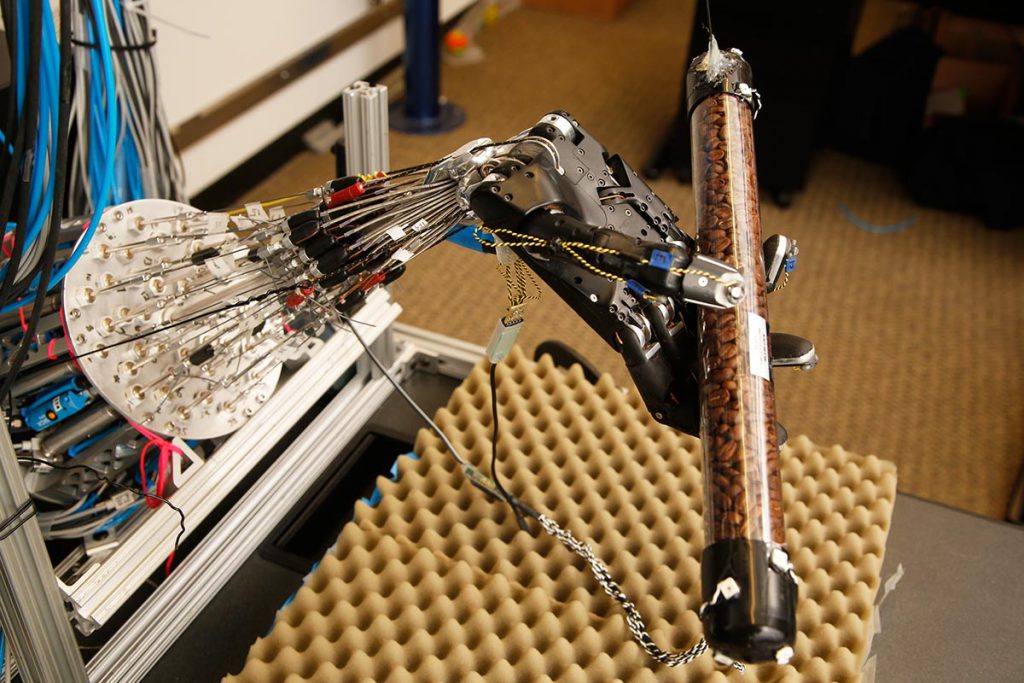
Después, desarrollaron un modelo digital preciso para simulaciones que permite a un ordenador analizar los movimientos en tiempo real. En su demostración más reciente, aplican el modelo al sistema y a tareas cotidianas como hacer rotar entre los dedos a un objeto alargado.
Con cada intento, la mano robótica aumenta progresivamente su destreza a la hora de hacer girar el tubo, gracias a los algoritmos de aprendizaje automático que la ayudan tanto a modelar la física básica implicada como a planear qué acciones debería realizar para alcanzar el resultado deseado.
Este método de aprendizaje autónomo desarrollado por el Laboratorio del Control de Movimiento de la citada universidad contrasta con la estrategia subyacente en muchas demostraciones robóticas, que precisan la labor previa de personas programando cada movimiento individual de la mano del robot para poder completar una única tarea.
En tales casos, los ingenieros observan un movimiento de una mano humana y tratan de determinar qué se necesita exactamente para reproducirlo en una mano robótica. Tal como argumenta Todorov, es casi como producir una película animada; el movimiento parece natural y espontáneo, pero hay un ejército de animadores detrás ajustándolo.
Lo que el equipo de Todorov y Kumar está usando es un enfoque universal que permite al robot aprender de sus propios movimientos y que no necesita los ajustes de ningún humano.
jcrh